BOSM -5020-5Z অপোজড-হেড বোরিং মিলিং মেশিন
1. সরঞ্জাম ব্যবহার:
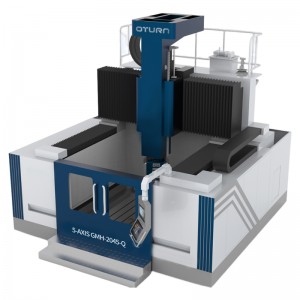
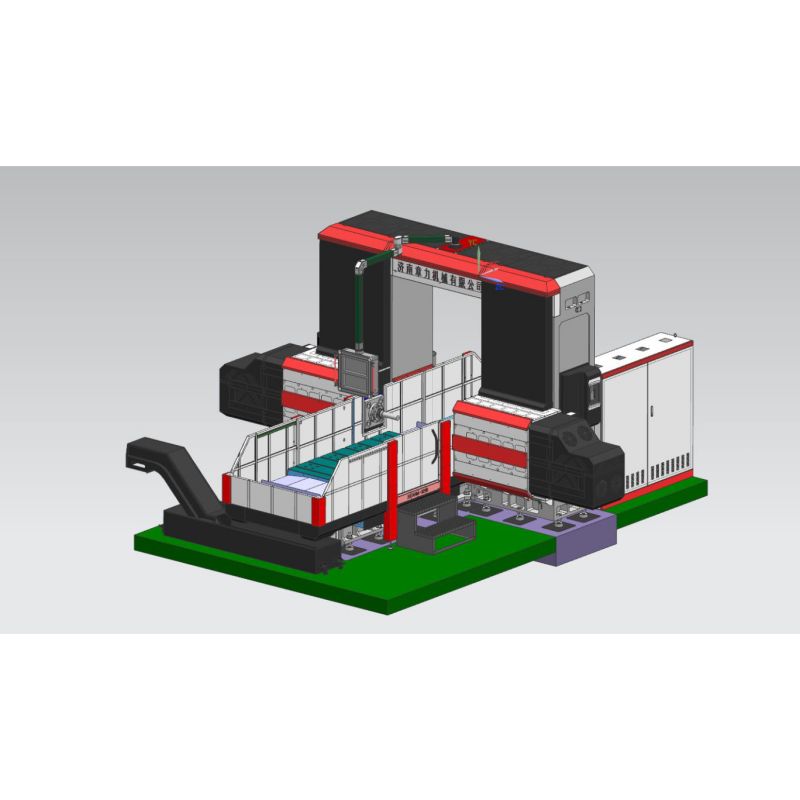
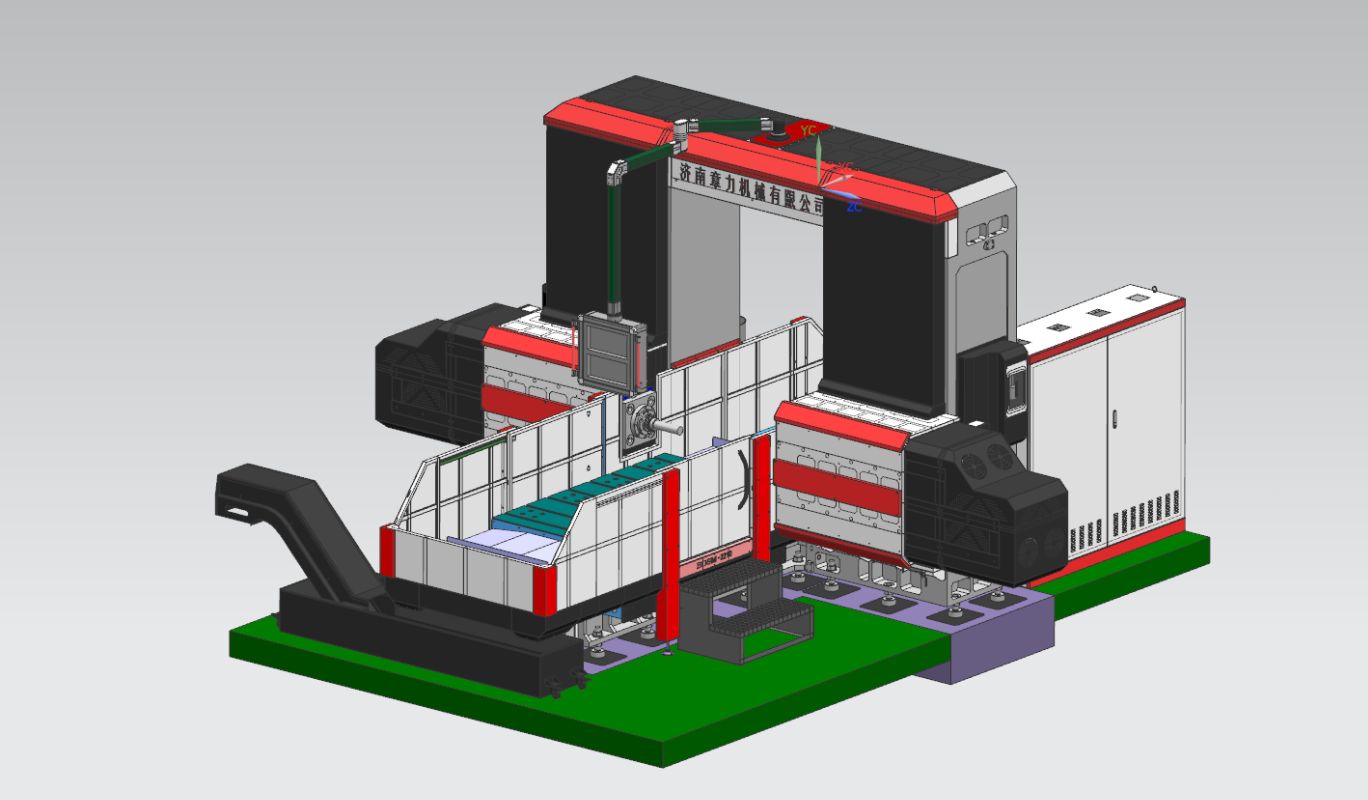
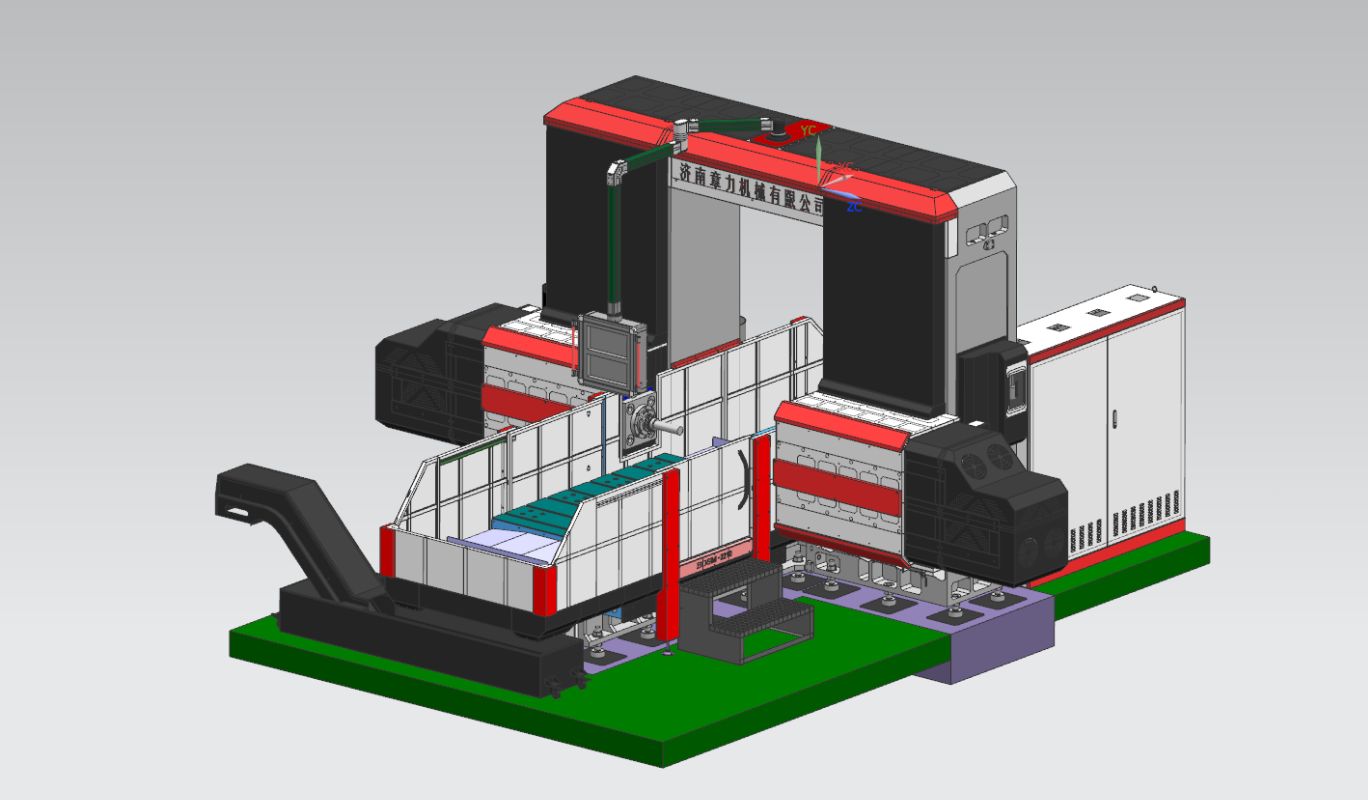
BOSM-5020-5Z CNC ওয়ার্কবেঞ্চ মোবাইল ডাবল-কলাম হেড-টু-হেড বোরিং এবং মিলিং মেশিন ইঞ্জিনিয়ারিং মেশিনারি সিমেট্রিকাল ওয়ার্কপিসগুলির জন্য একটি বিশেষ মেশিন। মেশিনটি একটি বিশেষ চলমান ওয়ার্কবেঞ্চ এবং দুটি সেট অনুভূমিক রাম দিয়ে সজ্জিত, যা কার্যকর স্ট্রোক পরিসরের মধ্যে ওয়ার্কপিসের ড্রিলিং, মিলিং, বিরক্তিকর এবং অন্যান্য প্রক্রিয়াকরণ উপলব্ধি করতে পারে, ওয়ার্কপিসটি এক সময়ে জায়গায় প্রক্রিয়া করা যেতে পারে (প্রয়োজন নেই সেকেন্ডারি ক্ল্যাম্পিং), দ্রুত লোডিং এবং আনলোডিং গতি, দ্রুত অবস্থানের গতি, উচ্চ প্রক্রিয়াকরণ নির্ভুলতা এবং উচ্চ প্রক্রিয়াকরণ দক্ষতা।
2. সরঞ্জাম কাঠামো:
2.1. মেশিনের প্রধান উপাদান
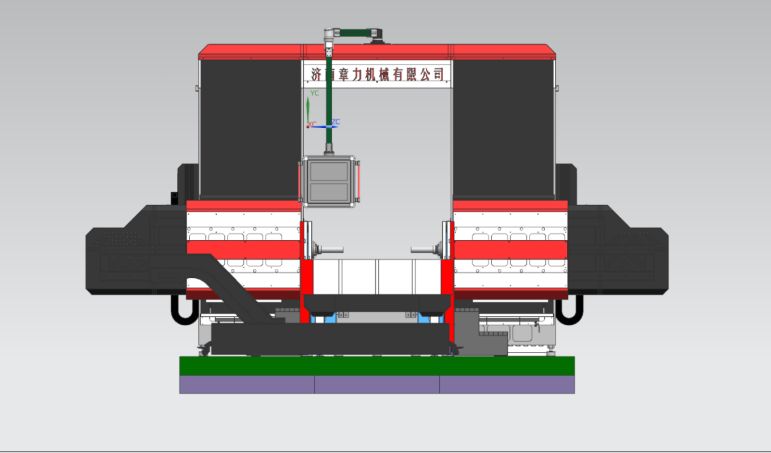
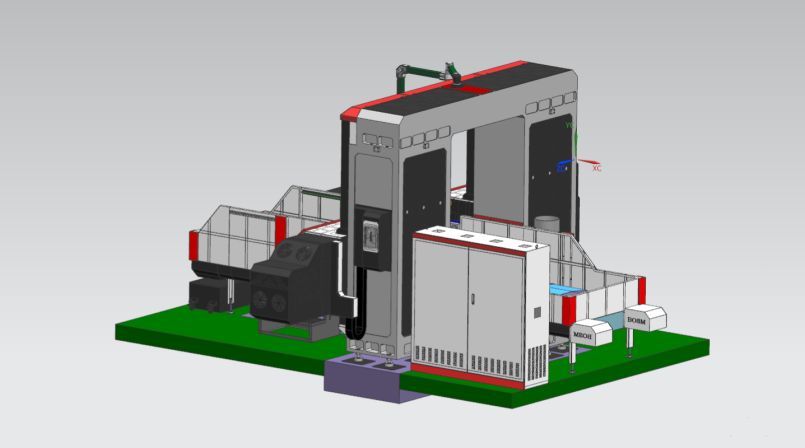
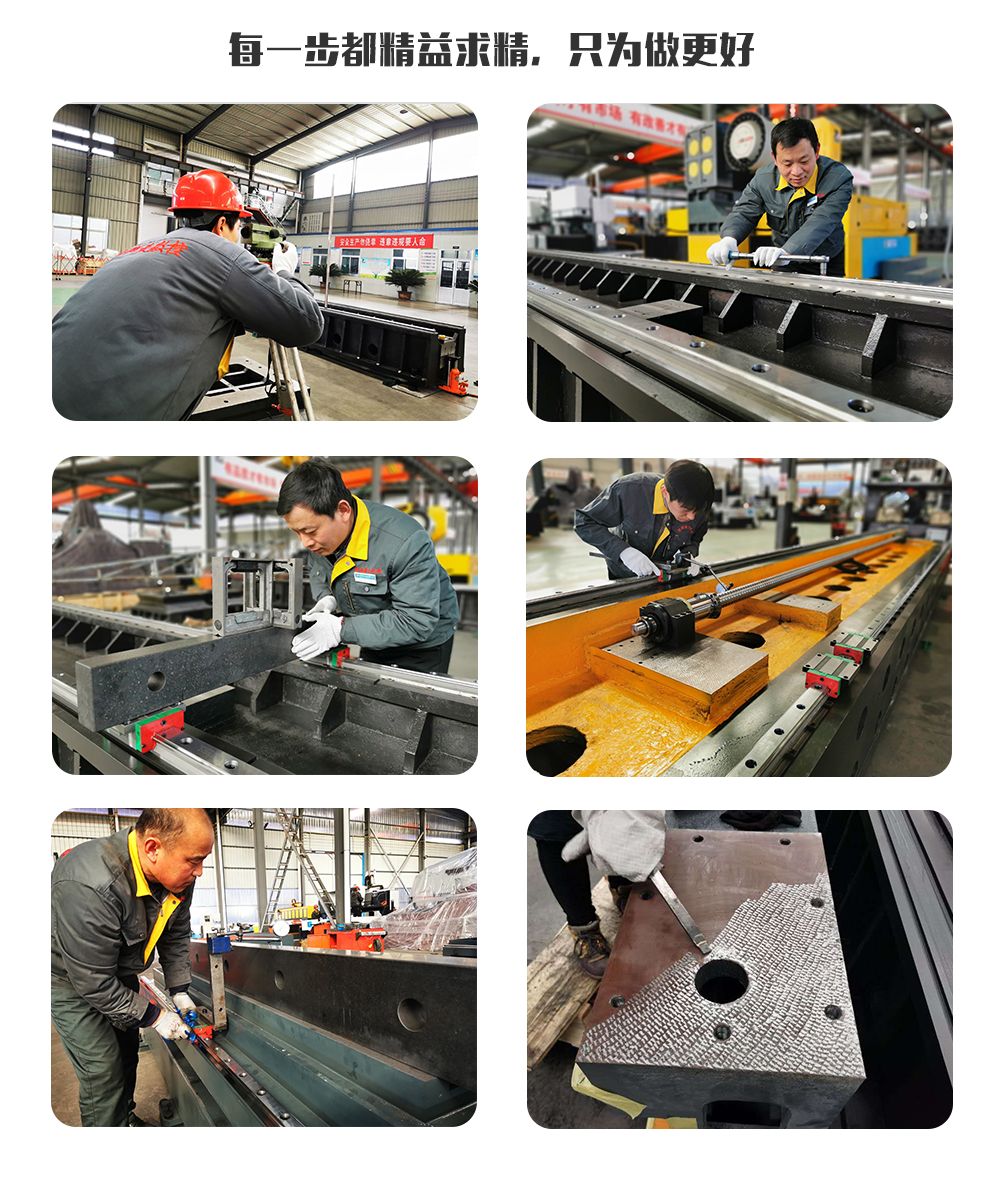
বিছানা, ওয়ার্কবেঞ্চ, বাম এবং ডান কলাম, বীম, গ্যান্ট্রি সংযোগকারী বিম, স্যাডল, রাম ইত্যাদি, সবই রজন বালি ছাঁচনির্মাণ, উচ্চ-মানের ধূসর লোহা 250 ঢালাই দিয়ে তৈরি, গরম বালির গর্তে অ্যানিল করা → কম্পন বার্ধক্য → ফার্নেস অ্যানিলিং → কম্পন বার্ধক্য→ রুক্ষ যন্ত্র → কম্পন বার্ধক্য→ চুল্লি annealing→ কম্পন বার্ধক্য→ সমাপ্তি, সম্পূর্ণরূপে অংশ নেতিবাচক চাপ নির্মূল, এবং অংশের কর্মক্ষমতা স্থিতিশীল রাখা. স্থির বিছানা, বাম এবং ডান কলাম, গ্যান্ট্রি, এবং ওয়ার্কবেঞ্চ সরানো; মেশিনে মিলিং, বোরিং কাটিং, ড্রিলিং, কাউন্টারসিঙ্কিং, ট্যাপিং এবং অন্যান্য ফাংশন রয়েছে, টুল কুলিং পদ্ধতি হল বাহ্যিক কুলিং, মেশিনে 5টি ফিড অক্ষ রয়েছে, যা 4-অক্ষ সংযোগ, 5-অক্ষ একক-ক্রিয়া, 2টি পাওয়ার হেড উপলব্ধি করতে পারে , মেশিনের অক্ষীয় এবং পাওয়ার হেড নীচের চিত্রে দেখানো হয়েছে।
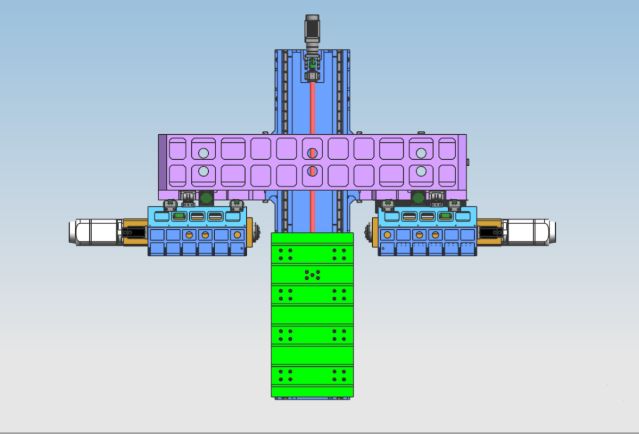
2.2. অক্ষীয় সংক্রমণ ফিড অংশ প্রধান গঠন
2.2.1। X-অক্ষ: ওয়ার্কটেবিল স্থির বিছানার গাইড রেল বরাবর পার্শ্বীয়ভাবে প্রতিদান করে।
এক্স-অক্ষ ট্রান্সমিশন: এক্স-অক্ষ রৈখিক গতি উপলব্ধি করতে বল স্ক্রু ট্রান্সমিশনের মাধ্যমে ওয়ার্কটেবল চালানোর জন্য এসি সার্ভো মোটর এবং উচ্চ-নির্ভুল প্ল্যানেটারি রিডুসার ব্যবহার করা হয়।
গাইড রেল ফর্ম: দুটি উচ্চ-শক্তি নির্ভুল লিনিয়ার গাইড রেল রাখুন
2.2.2.Y1 অক্ষ: পাওয়ার হেড এবং একটি রাম কলামের সামনের দিকে উল্লম্বভাবে ইনস্টল করা আছে, এবং কলামের গাইড রেল বরাবর বাম এবং ডানে পারস্পরিক সম্পর্ক স্থাপন করে।
Y1-অক্ষ ট্রান্সমিশন: AC servo মোটর ব্যবহার করা হয় বল স্ক্রু চালানোর জন্য স্যাডলকে সরানোর জন্য, এবং Y1-অক্ষের রৈখিক গতি উপলব্ধি করতে।
গাইড রেল ফর্ম: 45 ধরনের রৈখিক গাইড রেলের 4 টুকরা।
2.2.3.Y2 অক্ষ: পাওয়ার হেডের দ্বিতীয় র্যামটি কলামের সামনের দিকে উল্লম্বভাবে ইনস্টল করা আছে এবং কলামের গাইড রেল বরাবর বাম এবং ডানে প্রতিদান দেয়।
Y2-অক্ষ ট্রান্সমিশন: Y1-অক্ষের রৈখিক আন্দোলন উপলব্ধি করার জন্য স্যাডল মুভমেন্ট চালানোর জন্য বল স্ক্রু চালাতে এসি সার্ভো মোটর ব্যবহার করা হয়।
গাইড রেল ফর্ম: 45 ধরনের রৈখিক গাইড রেলের 4 টুকরা


2.2.4। Z1 অক্ষ: পাওয়ার হেড স্লাইডিং স্যাডলটি ডান কলামের সামনের দিকে উল্লম্বভাবে ইনস্টল করা আছে এবং কলাম গাইড রেল বরাবর উপরে এবং নিচের দিকে প্রতিদান দেয়।
Z1-অক্ষ ট্রান্সমিশন: Z1-অক্ষ রৈখিক গতি উপলব্ধি করতে বল স্ক্রু দিয়ে র্যাম চালানোর জন্য এসি সার্ভো মোটর এবং উচ্চ-নির্ভুল প্ল্যানেটারি রিডুসার ব্যবহার করা হয়।
গাইড রেল ফর্ম: 2 65 টাইপ লিনিয়ার গাইড রেল
2.2.5.Z2 অক্ষ: পাওয়ার হেড স্লাইড স্যাডলটি ডান কলামের সামনের দিকে উল্লম্বভাবে ইনস্টল করা আছে এবং কলাম গাইড রেল বরাবর উপরে এবং নিচের দিকে প্রতিদান দেয়।
Z1-অক্ষ ট্রান্সমিশন: AC servo মোটর প্লাস উচ্চ-নির্ভুল প্ল্যানেটারি রিডুসার Z2-অক্ষের রৈখিক গতি উপলব্ধি করতে বল স্ক্রু দিয়ে সরানোর জন্য রাম চালাতে ব্যবহার করা হয়।
গাইড রেল ফর্ম: 2 65 টাইপ লিনিয়ার গাইড রেল

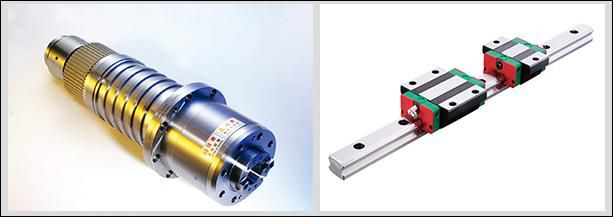
উচ্চ মানের HT250 ঢালাই কলাম 2 টুকরা 65 ধরনের হেভি-ডিউটি লিনিয়ার গাইড রেল
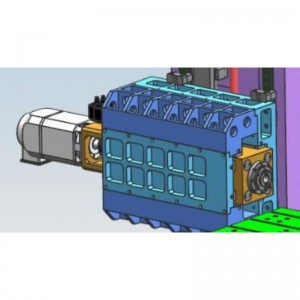
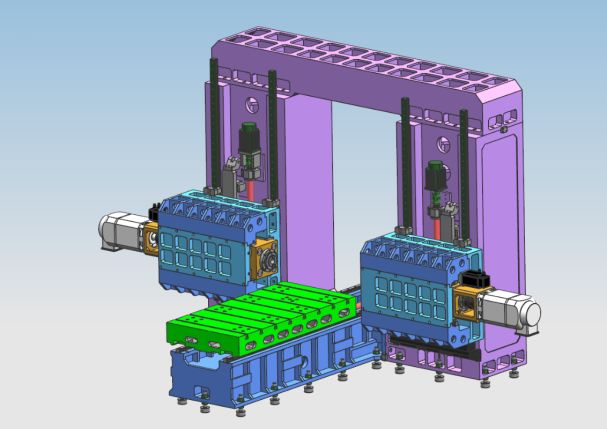
বোরিং এবং মিলিং পাওয়ার হেড (পাওয়ার হেড 1 এবং 2 সহ) একটি যৌগিক বর্গাকার রাম, এবং চলন্ত দিকটি 4টি লিনিয়ার রোলার গাইড রেল দ্বারা পরিচালিত হয়। নির্ভুল বল স্ক্রু জোড়া চালাতে ড্রাইভটি একটি এসি সার্ভো মোটর ব্যবহার করে। মেশিনটি নাইট্রোজেন ব্যালেন্স বার দিয়ে সজ্জিত। , স্ক্রু এবং সার্ভো মোটরের মেশিনের মাথার ভারবহন ক্ষমতা হ্রাস করুন। জেড-অক্ষ মোটরের একটি স্বয়ংক্রিয় ব্রেক ফাংশন রয়েছে। পাওয়ার ব্যর্থতার ক্ষেত্রে, স্বয়ংক্রিয় ব্রেক মোটর শ্যাফ্টকে শক্তভাবে ধরে রাখবে যাতে এটি ঘোরাতে না পারে। কাজ করার সময়, যখন ড্রিল বিট ওয়ার্কপিসকে স্পর্শ করে না, তখন এটি দ্রুত খাওয়াবে; যখন ড্রিল বিট ওয়ার্কপিসকে স্পর্শ করে, তখন এটি স্বয়ংক্রিয়ভাবে ওয়ার্কিং ফিডে চলে যাবে। যখন ড্রিল বিট ওয়ার্কপিসে প্রবেশ করে, এটি স্বয়ংক্রিয়ভাবে দ্রুত রিওয়াইন্ডে স্যুইচ করবে; যখন ড্রিল বিটের শেষ ওয়ার্কপিস ছেড়ে যায় এবং সেট অবস্থানে পৌঁছায়, তখন এটি স্বয়ংক্রিয় সঞ্চালন উপলব্ধি করতে পরবর্তী গর্ত অবস্থানে চলে যাবে। এবং এটি ব্লাইন্ড হোল ড্রিলিং, মিলিং, চ্যামফেরিং, চিপ ব্রেকিং, স্বয়ংক্রিয় চিপ অপসারণ ইত্যাদির কাজগুলি উপলব্ধি করতে পারে, যা শ্রম উত্পাদনশীলতা উন্নত করে।


500 মিমি স্ট্রোক কম্পাউন্ড স্কয়ার রাম পাওয়ার হেড বর্গাকার রাম-এর অনমনীয়তা বজায় রেখে গাইডিং নির্ভুলতাকে ব্যাপকভাবে উন্নত করতে ঐতিহ্যগত সন্নিবেশের পরিবর্তে লিনিয়ার গাইড ব্যবহার করে।
2.3. চিপ অপসারণ এবং কুলিং
ওয়ার্কবেঞ্চের নীচে উভয় পাশে সর্পিল এবং ফ্ল্যাট চেইন চিপ কনভেয়র ইনস্টল করা আছে এবং সভ্য উত্পাদন উপলব্ধি করতে চিপগুলি সর্পিল এবং চেইন প্লেটের দুটি পর্যায়ের মাধ্যমে স্বয়ংক্রিয়ভাবে চিপ পরিবাহকের কাছে পৌঁছে দেওয়া যেতে পারে। চিপ কনভেয়ারের কুল্যান্ট ট্যাঙ্কে একটি কুলিং পাম্প রয়েছে, যা সরঞ্জামটির কার্যকারিতা এবং পরিষেবা জীবন নিশ্চিত করতে সরঞ্জামটির বাহ্যিক শীতল করার জন্য ব্যবহার করা যেতে পারে এবং কুল্যান্টটি পুনর্ব্যবহৃত করা যেতে পারে।

3. সম্পূর্ণ ডিজিটাল সংখ্যাসূচক নিয়ন্ত্রণ ব্যবস্থা:
3.1। চিপ ব্রেকিং ফাংশন সহ, চিপ ব্রেকিং টাইম এবং চিপ ব্রেকিং সাইকেল ম্যান-মেশিন ইন্টারফেসে সেট করা যেতে পারে।
3.2। টুল লিফটিং ফাংশন দিয়ে সজ্জিত, টুল লিফটিং দূরত্ব ম্যান-মেশিন ইন্টারফেসে সেট করা যেতে পারে। দূরত্বে পৌঁছে গেলে, টুলটি দ্রুত উত্তোলন করা হয়, তারপরে চিপগুলি ফেলে দেওয়া হয় এবং তারপরে এটি দ্রুত ড্রিলিং পৃষ্ঠে ফরোয়ার্ড করা হয় এবং স্বয়ংক্রিয়ভাবে কাজে রূপান্তরিত হয়।
3.3। কেন্দ্রীভূত অপারেশন কন্ট্রোল বক্স এবং হ্যান্ড-হেল্ড ইউনিট সংখ্যাসূচক নিয়ন্ত্রণ ব্যবস্থা গ্রহণ করে এবং ইউএসবি ইন্টারফেস এবং এলসিডি লিকুইড ক্রিস্টাল ডিসপ্লে দিয়ে সজ্জিত। প্রোগ্রামিং, স্টোরেজ, ডিসপ্লে এবং যোগাযোগের সুবিধার জন্য, অপারেশন ইন্টারফেসে ম্যান-মেশিন ডায়ালগ, ত্রুটির ক্ষতিপূরণ এবং স্বয়ংক্রিয় অ্যালার্মের মতো ফাংশন রয়েছে।
3.4। সরঞ্জামগুলির প্রক্রিয়াকরণের আগে গর্তের অবস্থানের পূর্বরূপ দেখার এবং পুনরায় পরিদর্শনের কাজ রয়েছে এবং অপারেশনটি খুব সুবিধাজনক।
4. স্বয়ংক্রিয় তৈলাক্তকরণ
মেশিনের নির্ভুলতা লিনিয়ার গাইড রেল জোড়া, নির্ভুল বল স্ক্রু জোড়া এবং অন্যান্য উচ্চ-নির্ভুল গতি জোড়া স্বয়ংক্রিয় তৈলাক্তকরণ সিস্টেমের সাথে সজ্জিত। স্বয়ংক্রিয় তৈলাক্তকরণ পাম্প চাপ তেল আউটপুট, এবং পরিমাণগত লুব্রিকেটর তেল চেম্বার তেল প্রবেশ করে। তেলের চেম্বারটি তেল দিয়ে পূর্ণ হওয়ার পরে, যখন সিস্টেমের চাপ 1.4-1.75Mpa-এ বেড়ে যায়, তখন সিস্টেমে চাপের সুইচ বন্ধ হয়ে যায়, পাম্প বন্ধ হয়ে যায় এবং আনলোডিং ভালভ একই সময়ে আনলোড হয়। যখন রাস্তায় তেলের চাপ 0.2Mpa-এর নিচে নেমে যায়, তখন পরিমাণগত লুব্রিকেটর লুব্রিকেটিং পয়েন্টটি পূরণ করতে শুরু করে এবং একটি তেল ভর্তি সম্পূর্ণ করে। পরিমাণগত তেল ইনজেক্টরের সঠিক তেল সরবরাহ এবং সিস্টেমের চাপ সনাক্তকরণের কারণে, তেল সরবরাহ নির্ভরযোগ্য, প্রতিটি কাইনেমেটিক জোড়ার পৃষ্ঠে একটি তেল ফিল্ম রয়েছে তা নিশ্চিত করে, ঘর্ষণ এবং পরিধান হ্রাস করে এবং ক্ষতি প্রতিরোধ করে অভ্যন্তরীণ গঠন অতিরিক্ত উত্তাপ দ্বারা সৃষ্ট. , মেশিনের নির্ভুলতা এবং জীবন নিশ্চিত করতে। স্লাইডিং গাইড রেল জোড়ার সাথে তুলনা করে, এই মেশিনে ব্যবহৃত রোলিং রৈখিক গাইড রেল জোড়ার সুবিধার একটি সিরিজ রয়েছে:
① গতি সংবেদনশীলতা উচ্চ, রোলিং গাইড রেলের ঘর্ষণ সহগ ছোট, শুধুমাত্র 0.0025~ 0.01, এবং ড্রাইভিং শক্তি ব্যাপকভাবে হ্রাস পেয়েছে, যা সাধারণ যন্ত্রপাতির 1/10 এর সমান।
② গতিশীল এবং স্ট্যাটিক ঘর্ষণ মধ্যে পার্থক্য খুব ছোট, এবং ফলো-আপ কর্মক্ষমতা চমৎকার, অর্থাৎ, ড্রাইভিং সংকেত এবং যান্ত্রিক কর্মের মধ্যে সময়ের ব্যবধান অত্যন্ত সংক্ষিপ্ত, যা প্রতিক্রিয়া গতি এবং সংবেদনশীলতা উন্নত করার জন্য সহায়ক সংখ্যাসূচক নিয়ন্ত্রণ ব্যবস্থা।
③এটি উচ্চ-গতির রৈখিক গতির জন্য উপযুক্ত, এবং এর তাত্ক্ষণিক গতি স্লাইডিং গাইড রেলের তুলনায় প্রায় 10 গুণ বেশি।
④ এটি ফাঁকহীন আন্দোলন উপলব্ধি করতে পারে এবং যান্ত্রিক সিস্টেমের আন্দোলনের অনমনীয়তা উন্নত করতে পারে।
⑤ পেশাদার নির্মাতাদের দ্বারা উত্পাদিত, এটির উচ্চ নির্ভুলতা, ভাল বহুমুখিতা এবং সহজ রক্ষণাবেক্ষণ রয়েছে।
5.তিন-অক্ষ লেজার পরিদর্শন:
বোসম্যানের প্রতিটি মেশিন ইউনাইটেড কিংডমের RENISHAW কোম্পানির লেজার ইন্টারফেরোমিটার দ্বারা ক্যালিব্রেট করা হয় যাতে গতিশীল, স্থিতিশীল স্থিতিশীলতা এবং প্রক্রিয়াকরণের নির্ভুলতা নিশ্চিত করতে পিচ ত্রুটি, ব্যাকল্যাশ, অবস্থান নির্ভুলতা, পুনরাবৃত্তি অবস্থান নির্ভুলতা ইত্যাদি সঠিকভাবে পরিদর্শন ও ক্ষতিপূরণ করা হয়। মেশিন বলবার পরিদর্শন প্রতিটি মেশিন সত্যিকারের বৃত্তের নির্ভুলতা এবং মেশিনের জ্যামিতিক নির্ভুলতা ক্রমাঙ্কন করতে ব্রিটিশ RENISHAW কোম্পানির একটি বলবার ব্যবহার করে এবং মেশিনের 3D মেশিনিং নির্ভুলতা এবং সার্কুলার নির্ভুলতা নিশ্চিত করতে একই সময়ে বৃত্তাকার কাটিং পরীক্ষা পরিচালনা করে।


6. মেশিন ব্যবহারের পরিবেশ:
6.1। সরঞ্জাম ব্যবহার পরিবেশ প্রয়োজনীয়তা
পরিবেষ্টিত তাপমাত্রার একটি ধ্রুবক স্তর বজায় রাখা নির্ভুল যন্ত্রের জন্য একটি অপরিহার্য বিষয়।
(1) উপলভ্য পরিবেষ্টিত তাপমাত্রার প্রয়োজনীয়তা -10°C থেকে 35°C, যখন পরিবেষ্টিত তাপমাত্রা 20°C হয়, আর্দ্রতা 40% থেকে 75% হওয়া উচিত।
(2) নির্দিষ্ট সীমার মধ্যে মেশিনের স্থির নির্ভুলতা রাখার জন্য, সর্বোত্তম পরিবেষ্টিত তাপমাত্রা 15°C থেকে 25°C হতে হবে এবং তাপমাত্রার পার্থক্য ±2°C/24h এর বেশি হবে না৷
6.2। পাওয়ার সাপ্লাই ভোল্টেজ: 3 ফেজ, 380V, ±10% ভোল্টেজ ওঠানামার সীমার মধ্যে, পাওয়ার সাপ্লাই ফ্রিকোয়েন্সি: 50HZ।
6.3। যদি ব্যবহারের ক্ষেত্রে ভোল্টেজ অস্থির হয়, তবে মেশিনের স্বাভাবিক ক্রিয়াকলাপ নিশ্চিত করতে মেশিনটিকে একটি স্থিতিশীল পাওয়ার সাপ্লাই দিয়ে সজ্জিত করা উচিত।
6.4। মেশিনের নির্ভরযোগ্য গ্রাউন্ডিং থাকা উচিত: গ্রাউন্ডিং তারটি একটি তামার তার, তারের ব্যাস 10mm² এর কম হওয়া উচিত নয় এবং গ্রাউন্ডিং প্রতিরোধের 4 ওহমের কম হওয়া উচিত।
6.5। সরঞ্জামের স্বাভাবিক কার্যক্ষমতা নিশ্চিত করার জন্য, যদি বায়ু উত্সের সংকুচিত বায়ু বায়ু উত্সের প্রয়োজনীয়তা পূরণ করতে না পারে, তবে বায়ু গ্রহণের আগে বায়ু উত্স পরিশোধন ডিভাইসের একটি সেট (ডিহিউমিডিফিকেশন, ডিগ্রেসিং, ফিল্টারিং) যুক্ত করা উচিত। মেশিনের
৬.৬। সরাসরি সূর্যালোক, কম্পন এবং তাপের উত্স, উচ্চ-ফ্রিকোয়েন্সি জেনারেটর, বৈদ্যুতিক ওয়েল্ডিং মেশিন ইত্যাদি থেকে সরঞ্জামগুলিকে দূরে রাখুন, যাতে মেশিনের উত্পাদন ব্যর্থতা বা মেশিনের নির্ভুলতার ক্ষতি এড়াতে পারে।
7প্রযুক্তিগত পরামিতি:
| মডেল | 5020-5Z | |
| সর্বাধিক প্রক্রিয়াকরণ workpiece আকার | দৈর্ঘ্য × প্রস্থ × উচ্চতা (মিমি) | 5000×2000×2500 |
| গ্যান্ট্রি সর্বোচ্চ ফিড | প্রস্থ (মিমি) | 2300 |
| কাজের ডেস্কের আকার | দৈর্ঘ্য X প্রস্থ (মিমি) | 5000*2000 |
| টেবিল ভ্রমণ | ওয়ার্কবেঞ্চ সামনে পিছনে চলে (মিমি) | 5000 |
| ডাবল রাম উপরে এবং নিচে উত্তোলন | রাম এর আপ এবং ডাউন স্ট্রোক (মিমি) | 2500 |
| অনুভূমিক রাম টাইপ ড্রিলিং হেড পাওয়ার হেড এক দুই | পরিমাণ (2) | 2 |
| অনুভূমিক রাম টাইপ ড্রিলিং হেড পাওয়ার হেড এক দুই | স্পিন্ডল টেপার | BT50 |
| টাকু গতি (r/min) | 30~5000 | |
| সার্ভো স্পিন্ডেল মোটর পাওয়ার (কিলোওয়াট) | 37*2 | |
| দুটি স্পিন্ডেলের নাকের প্রান্তের কেন্দ্রগুলির মধ্যে দূরত্ব (মিমি) | 1500-2500 মিমি | |
| একক রাম (মিমি) এর বাম এবং ডান স্ট্রোক | 500 | |
| ডাবল রাম (মিমি) এর বাম এবং ডান স্ট্রোক | 1000 | |
| দ্বিমুখী অবস্থান নির্ভুলতা | 300 মিমি * 300 মিমি | ±0.025 |
| দ্বি-দিকনির্দেশক পুনরাবৃত্তি অবস্থান নির্ভুলতা | 300 মিমি * 300 মিমি | ±0.02 |
| মোট ওজন (টি) | (প্রায়) 55 | মোট ওজন (টি) |